Forschungsprojekt
HSR Studierende machen Drohne zum fliegenden Rettungshund
Bei alpinen Rettungseinsätzen können Drohnen eine hilfreiche Ergänzung zu menschlichen Rettern oder Suchhunden sein: in Situationen, in denen Helikopter nicht fliegen können, oder an Stellen, wo es für Menschen und Hunde zu gefährlich ist. Studierende der HSR haben für die alpine Rettungsstation Schwägalp-Säntis eine intuitive Steuerungssoftware für Drohnen entwickelt.
Ein paar Bewegungen auf dem Tablet und schon startet die Drohne, um ein vorgegebenes Suchraster abzufliegen. Virtuell an Bord ist dabei Rettungschef Heinz Beutler, der im Gebiet um die Rettungsstation Schwägalp-Säntis immer wieder Rettungseinsätze für Vermisste und Verletzte koordiniert. Deshalb wandte sich der Rettungschef an die HSR.
Zusammen mit Prof. Dr. Farhad Mehta aus dem Studiengang Informatik der HSR entwickelten Heinz Beutler und Beat Helfenberger, beide hauptberuflich bei der Digital-Agentur Namics tätig, die Aufgabenstellung für eine Bachelorarbeit.
Das Ziel war eine intuitive Steuerung, die eine Drohne dazu befähigt, autonom ein definiertes Gebiet abzusuchen und Videoaufnahmen für die Auswertung zu sammeln.
Spannende Aufgabe für zwei Studierende
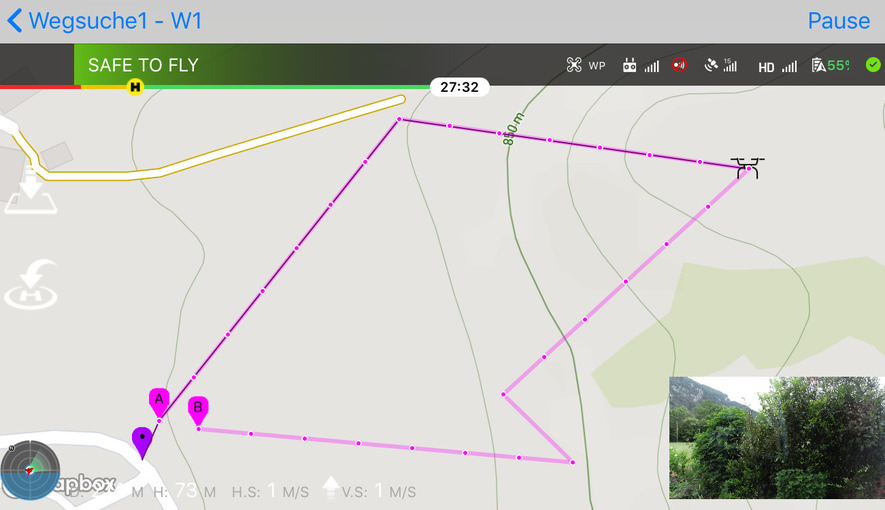
Daraufhin haben sich zwei Studierende an die Entwicklung einer Applikation für Smartphone oder Tablet gemacht. «Der Einsatzleiter zeichnet den Flugplan der Drohne per Touchscreen oder Mausgesten in einer Webapplikation auf einer Karte ein. Der Pilot packt die Drohne aus, wählt den zuvor vom Einsatzleiter erstellten Suchauftrag aus, definiert Startparameter wie initiale Höhe und Fluggeschwindigkeit, drückt Start und die Drohne fliegt dann selbstständig das definierte Gebiet ab», erklärt David Riederer, ebenfalls HSR Informatik-Student, die Bedienung der Software.
Mit Hilfe der Koordinaten der geplanten Flugroute und des digitalen Höhenmodells berechnen die Studenten in der Mobile-App durch einen Algorithmus weitere Koordinaten mitsamt ihrer Höhe und übertragen diese auf die Drohne, damit ein autonomer Flug stattfinden kann. Sobald die Drohne das Gebiet überflogen hat, kann der Rettungsleiter innert kürzester Zeit aktuelle Videoaufnahmen des Suchgebiets auswerten und den Rettungseinsatz auf Gebiete konzentrieren, in denen die Videobilder der Drohne etwas Auffälliges wie beispielsweise eine am Boden liegende Person zeigen.
Ergänzung statt Ersatz
Haben menschliche Retter und Suchhunde bei alpinen Rettungseinsätzen also bald ausgedient? Nicht wenn man Rettungschef Heinz Beutler fragt: «Die Drohne ist ein zusätzliches Hilfsmittel, vor allem bei Wetterlagen, in denen Helikopter nicht fliegen können, oder an ausgesetzten Stellen, die für Hunde zu gefährlich sind.»
In solchen Situationen könnten Drohnen bei geringem Risiko die menschlichen Retter bei der Suche unterstützen. Diese wiederum können sich auf ihre Aufgaben konzentrieren, während die Drohne selbstständig das Suchgebiet abfliegt. Weitere Massnahmen wie die Bergung von Verletzten oder die medizinische Versorgung müssten aber weiterhin menschliche Retter durchführen.
Erfolgreiche Testflüge
Am Projekt interessiert zeigte sich auch die Kantonspolizei Appenzell-Innerrhoden. Kapo-Drohnenspezialist Thomas Zimmermann rechnet vor allem bei «grossflächigen Tatbestandsaufnahmen sowie für die Abschätzung von Schäden bei Naturereignissen» oder bei Suchaktionen nach Vermissten künftig mit der Unterstützung durch fliegende Drohnen.
Die ersten Testflüge der Drohne lieferten bereits gute Ergebnisse und zeigten auch das weitere Entwicklungspotenzial für die Drohnensteuerung auf. Während die beiden Studenten mit dem Drohnen-Projekt ihren Bachelor in Informatik erfolgreich abschliessen konnten, plant Prof. Dr. Farhad Mehta bereits weitere Studienarbeiten, um die Drohnensteuerung in den nächsten Semestern weiterzuentwickeln. Läuft alles nach Plan, könnten alpine Rettungseinsätze künftig vermehrt mit autonomer Unterstützung aus der Luft stattfinden.
---
Mit Deep Learning die Bergrettung optimieren
An die Weiterentwicklung der Bergrettung mittels Drohnenunterstützung haben sich 2019 zwei weitere Studierende aus dem Studiengang Informatik gemacht. Ihr Ziel: die Videoanalyse von Rettungsdrohnen zu automatisieren und damit Rettungseinsätze zu beschleunigen.
Projektteam:
Prof. Dr. Farhad D. Mehta
IFS Institut für SoftwareProfessor of Programming Languages and Software Engineering
+41 58 257 46 16farhad.mehta@ost.ch