Allgemeines Projekt
Fahrsicherheit mittels Torque Vectoring durch elektromechanische Bremseingriffe
In diesem Projekt wurde der Fahrsicherheit mittels Torque Vectoring untersucht. Beim Ausfall eines Steer-by-Wire Lenksystems soll die elektromechanische Bremse das Lenken übernehmen und so ein sicheres Fahrverhalten sicherstellen.
Problemstellung
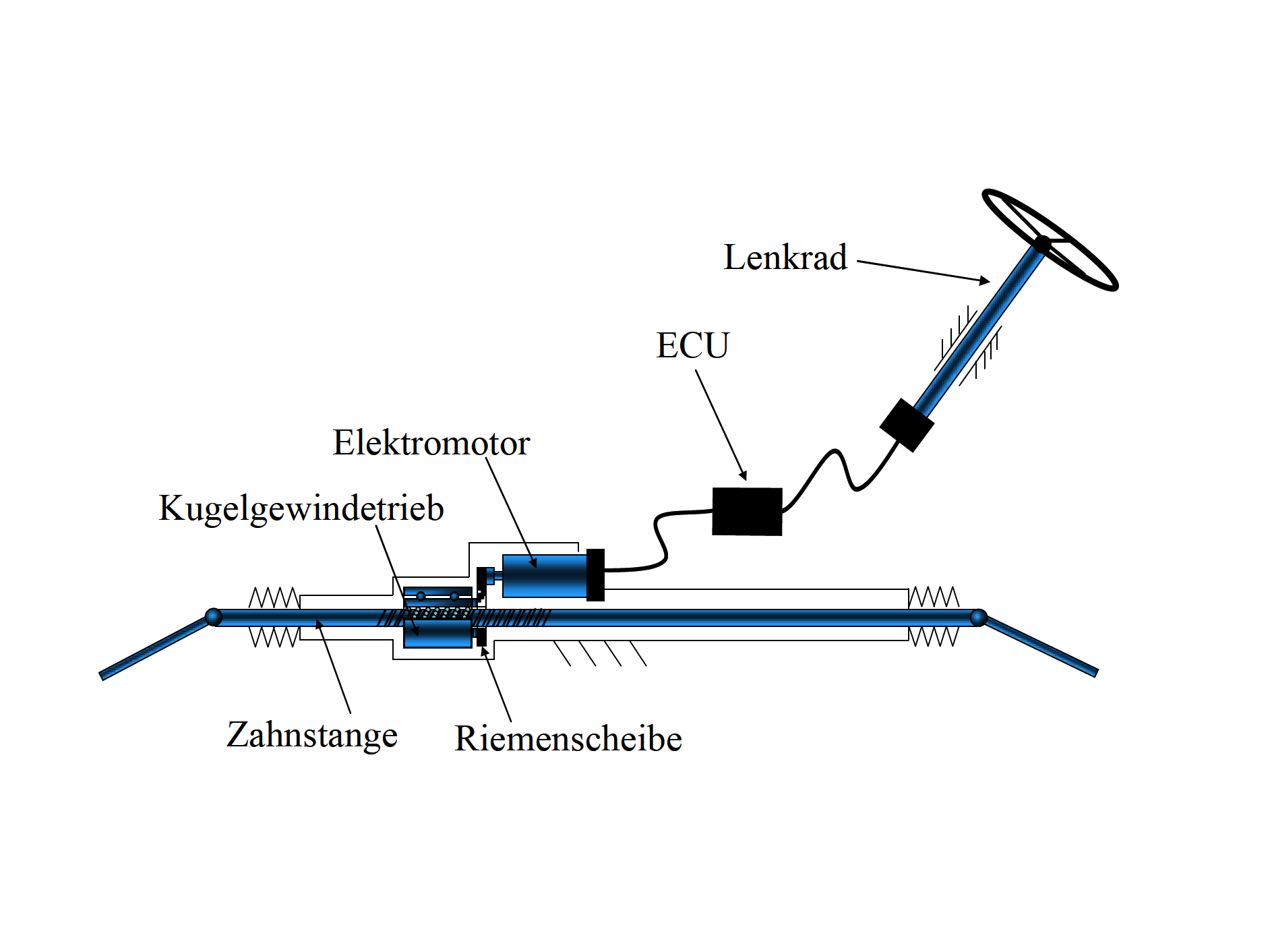
Ein Lenksystem mit Steer-by-wire hat die Eigenschaft, dass keine mechanische Verbindung mehr zwischen dem Lenkrad und den Rädern besteht. Der Winkel am Lenkrad wird gemessen und dem Lenkmotor übergeben, der das Lenken der Räder übernimmt. Um trotzdem ein Fahrgefühl zu ermöglichen, wird das Feedback am Lenkrad mit einem weiteren Aktuator übertragen. Bei einem Ausfall des Lenkmotors oder dessen Steuerung besteht die Gefahr, dass das Fahrzeug nicht mehr kontrollierbar ist.
Idee
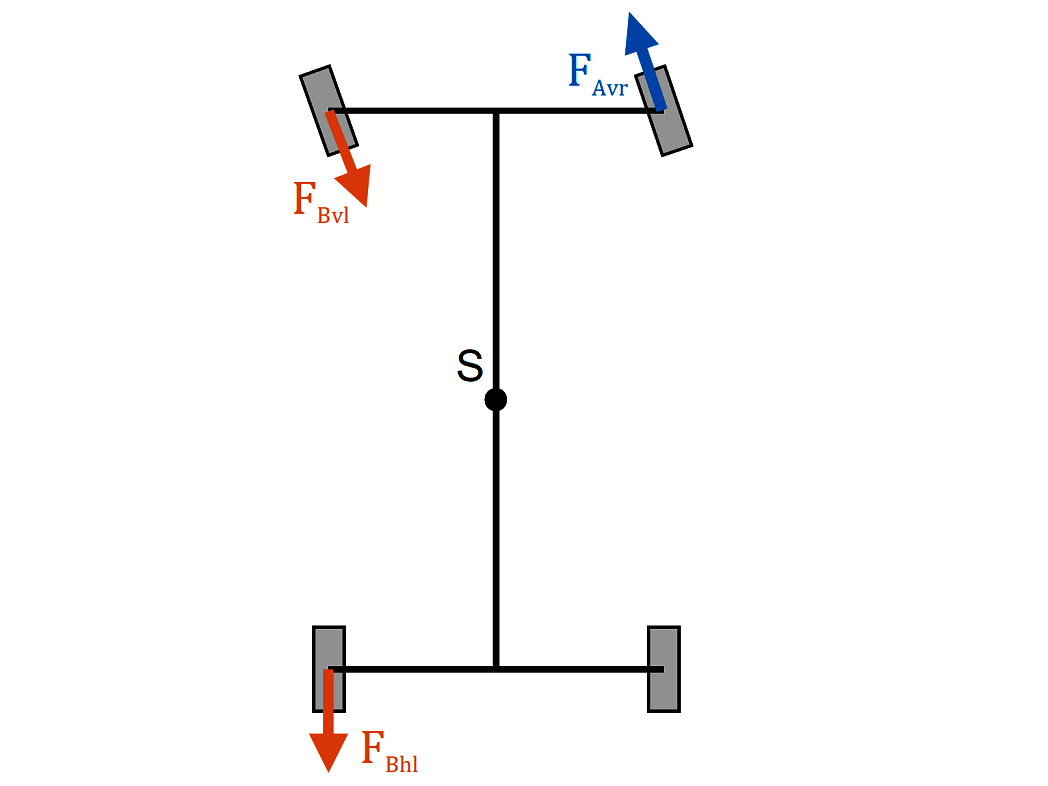
Damit das Fahrzeug bei einem Ausfall trotzdem lenkbar bleibt, wurde in diesem Projekt eine elektromechanische Bremse ausgelegt. Die kann genügend schnell agieren und somit das Lenken mittels Torquesteering gewährleisten. Dazu muss die Fahrwerkskinematik so ausgelegt sein, dass ein asymmetrischer Bremseingriff (Differenz: links vs. rechts) ein Einlenken der Vorderachse nach sich zieht. Ausserdem wurde ein Regelungskonzept für das genannte Einlenken entwickelt und mittels Mehrkörpersimulation erprobt.
Resultat
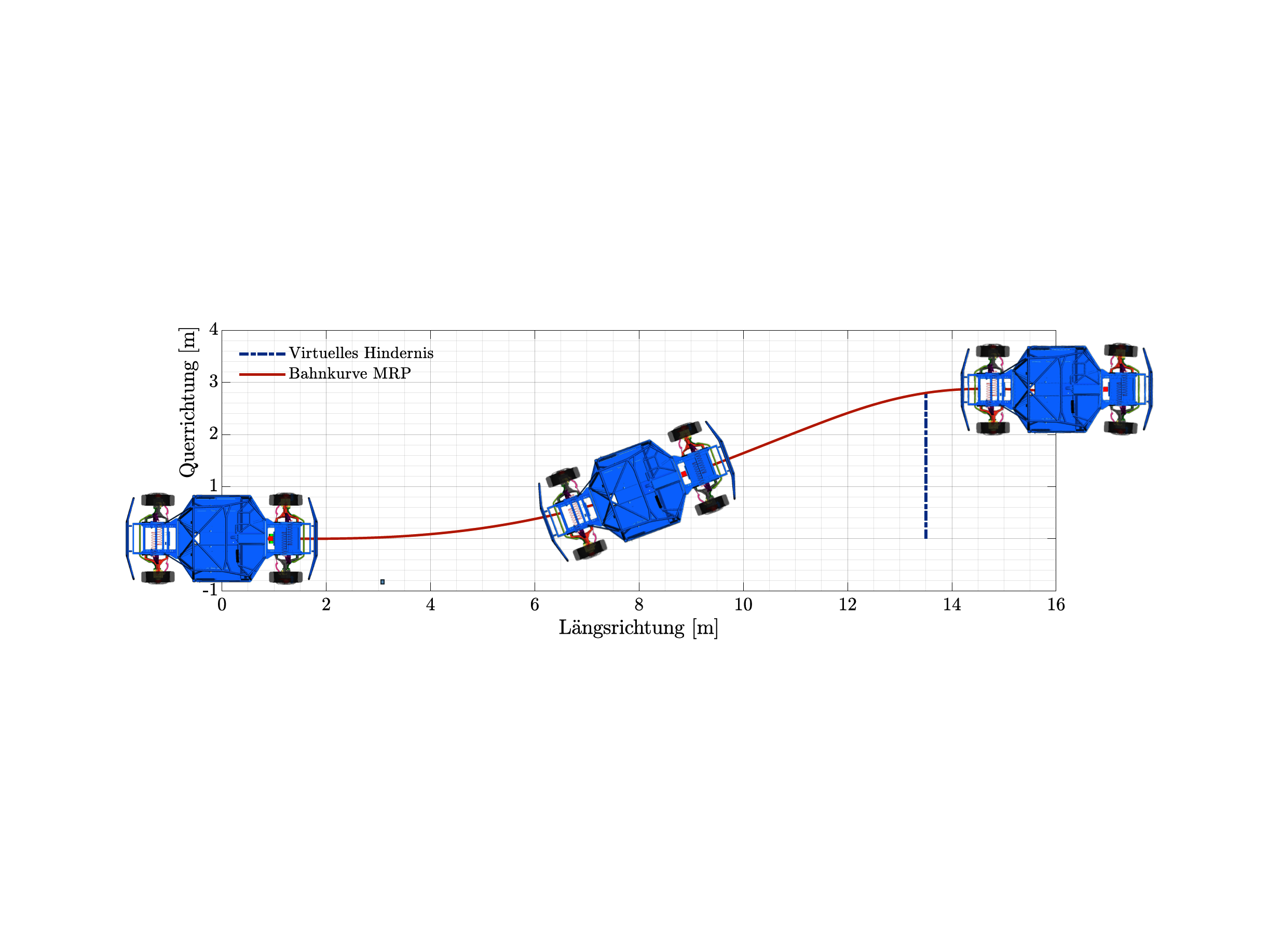
Die Simulationen haben gezeigt, dass es möglich ist mit geeigneten Regelstrategien mit gezieltem Bremseingriff das Fahrzeug im Modell zu lenken. Diese Erkenntnisse wurden anschliessend auf einem Versuchsfahrzeug umgesetzt und auch dort wurden die Resultate im Versuch bestätigt. Dieses System kann nun als Rückfallebene für eine Steer-by-wire Lenkung angewendet werden.
Projektteam:
Kristian Murkovic
EMS Institut für Entwicklung Mechatronischer SystemeWissenschaftlicher Mitarbeiter
+41 58 257 34 90kristian.murkovic@ost.ch