Allgemeines Projekt
Low-Cost multistatischer Radarscanner zur robusten Detektion und Visualisierung von Objekten im Untergrund
Marco Stieger, Stefan Tobler
Hinter Wände sehen
Das Auffinden von Objekten im Untergrund mittels Radartechnik ist in vielen Anwendungen die einzige praktikable abbildende Methode, insbesondere in der Baubranche zur Lokalisierung von Rohren und Armierungseisen oder zur Ortung von Leckagen. Sie hat gegenüber der Ultraschalltechnik den Vorteil, dass berührungslos und damit auch effizient gearbeitet werden kann. Der Einsatz von Röntgenstrahlung unterliegt strengen Vorschriften und ist für jeden Einsatz bewilligungspflichtig. Der Fortschritt in der Halbleitertechnologie und die damit verbundene Kostensenkung der Bauteile macht es möglich, dass breitbandige Radar-Frontends im Frequenzbereich bis zu 10 GHz zu sehr günstigen Kosten erhältlich sind. So bietet die Israelische Firma Vayyar [1] ein multistatisches Radar-Frontend mit bis zu neun UWB-Antennen an. Die Auswertung der Radardaten geschieht in Echtzeit ohne die Verwendung einer synthetischen Apertur. Die Zuverlässigkeit der Detektion sowie die Visualisierung der Daten kann durch Fokussierung mittels Migrationsalgorithmen deutlich verbessert werden. Diese Verbesserungen sind Ziel dieses Projekts.
Ground Penetrating Radar (GPR)
GPR ist eine Methode zur Untersuchung von optisch undurchsichtigen Strukturen, wie zum Beispiel einem Erdreich oder Mauerwerk. Dabei werden hochfrequente elektromagnetische Wellen in den Boden gesendet, die an Objekten oder Schichten reflektiert und an der Oberfläche wieder gemessen werden. Mithilfe der Laufzeiten lassen sich die Positionen dieser Inhomogenitäten bestimmen.
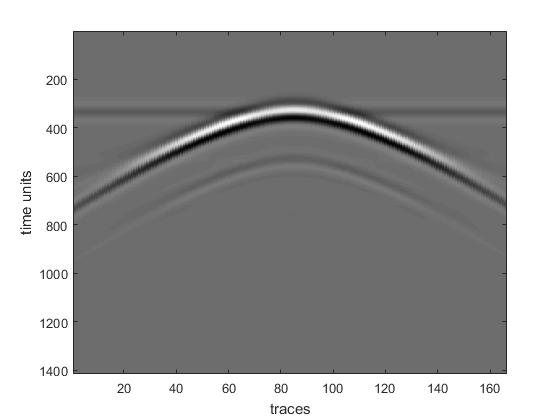
GPR-Impulsradare senden einen kurzen elektromagnetischen Puls im Ultrabreitband-Frequenzband (800MHz-10GHz, UWB) in das zu untersuchende Material und zeichnen dann Signalstärke A(t) der Reflektionen als Funktion der Laufzeit t auf (A-scan). Wird eine GPR-Antenne, die sowohl Sende- als auch Empfangselemente enthält, auf oder sehr nahe der Oberfläche des zu untersuchenden Materials platziert und über sie entlang einer Richtung x bewegt, um einen Bereich abzutasten, entsteht ein sogenannter B-Scan B(x,t), eine Array von A-Scans als Funktion der Position x. Durch kontinuierliches Senden von Impulsen und Aufzeichnen der zugehörigen Rückmeldungen kann ein Radargrammbild des Untergrundes erzeugt und in Echtzeit auf einem geeigneten Bildschirm (PC/Tablett) betrachtet werden. Veränderungen in der Zusammensetzung des Untergrundes sind aufgrund des Luft-, Mineral- und Wassergehalts, des Vorhandenseins von Untergrund oder anderen geologischen Merkmalen sowie von Objekten wie vergrabenen Versorgungsleitungen zu erkennen.
Abbildung 1 zeigt einen solchen B-Scan. Durch das Bewegen der Sende-/Empfangsantenne entlang der Oberfläche wird der Abstand zum Target verkürzt. Nachdem die Position direkt über dem Objekt, bei der die kürzeste Laufzeit und die stärkste Amplitude gemessen werden, passiert wurde, wird der Abstand zum Target erneut grösser. Es entstehen, wie in der Abbildung 1 zu sehen ist, eine charakteristische Reflektions-Hyperbel. Ziel ist es, diese Hyperbel mit mathematischen Methoden zu einem konzentrierten Objekt zu fokussieren, um dadurch eine realitätsnahe Abbildung des Untergrunds zu erhalten. Da die Antenne einen grossen Öffnungswinkel aufweist und somit Reflektionen aus unterschiedlichen Richtungen empfangen kann, werden Objekte auch dann detektiert, wenn diese nicht direkt unter der Antenne liegen. Dies ist Voraussetzung dafür, dass die Methode der synthetischen Apertur überhaupt angewendet werden kann, um die Objekte im Untergrund zu fokussieren. Der Scan über die Oberfläche sammelt verschiedene Beugungsordnungen aus unterschiedlichen Richtungen, ähnlich wie eine optische Linse mit einer grossen Apertur. Die Operation der synthetischen Fokussierung der empfangenen Wellenfelder nennt man Migration.
Die Reichweite von GPR-Systemen wird hauptsächlich durch die Dämpfung des Untergrunds, die Ausbreitungsverluste und die Streuverluste an den Targets bestimmt [3, 4]. Bei der eingesetzten Frequenz handelt es sich immer um einen Kompromiss aus Eindringtiefe und Auflösungsvermögen.
Low-Cost-Radarscanner
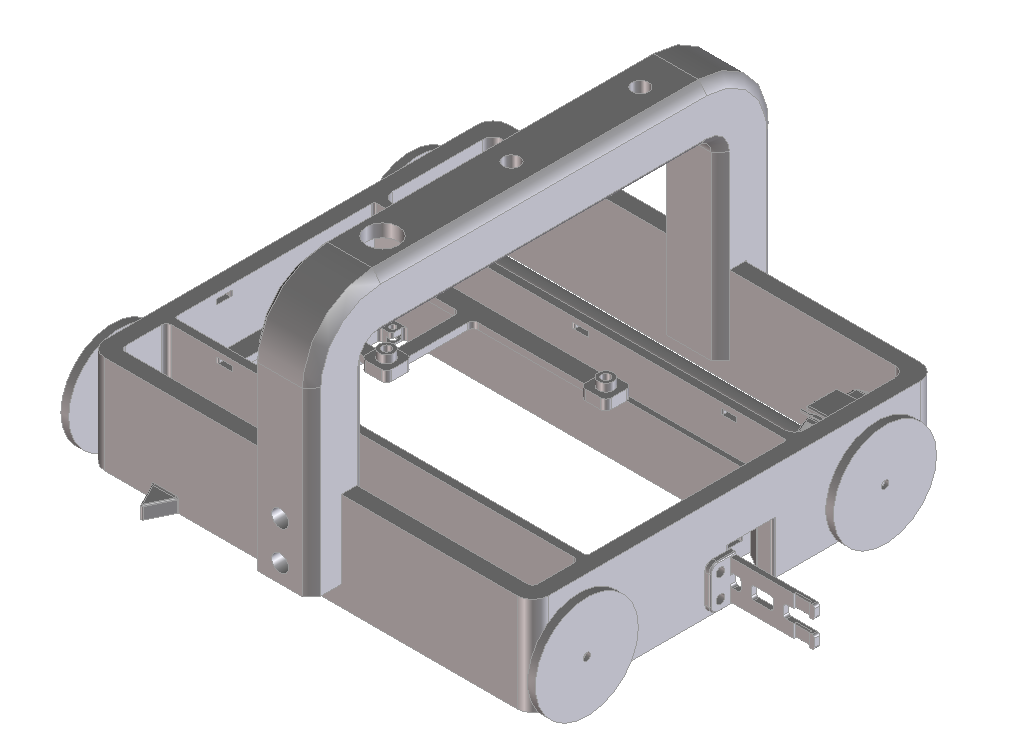
Ziel dieses Projektes ist die Realisierung eines low-cost Ultrawideband Radar-Handscanners und der Entwicklung der zugehörigen Signalverarbeitungskette zur Detektion und Visualisierung von Objekten im Untergrund. Die Basis des Scanners bildet die Walabot-Hardware der Firma Vayyar Imaging [1,2]. Im Gegensatz zur kommerziellen Variante dieses Scanners, wo punktweise multistatische Radarsignale zur Detektion eingesetzt werden, wird in dieser Arbeit durch kontrolliertes Scannen eine synthetische Apertur gebildet. Die so erzeugten Radarscans werden anschliessend mittels Migrationsalgorithmen zur zuverlässigeren Detektion fokussiert.
Abbildung 3 zeigt verschiedene B-scans über einem einzelnen Objekt (Target) in unterschiedlichen Tiefen. Klar erkennbar sind die Reflektions-Hyperbeln, welche mit zunehmender Objekt-Tiefe immer breiter werden. Dass im B-Scan nicht nur eine einzige Hyperbel erkennbar ist, lässt sich durch die limitierte Bandbreite des Systems erklären.
Diese Vielfach-Hyperbeln sind ein limiterender Faktor des Systems. Die EU-Version des Frontends hat eine beschränkte Bandbreite von 6-10 GHz, im Gegensatz zur US-Variante mit einer Bandbreite von 1-10 GHz. Für diese Anwendung wäre die Verwendung der US-Version zu bevorzugen.
Entfaltung (Deconvolution)
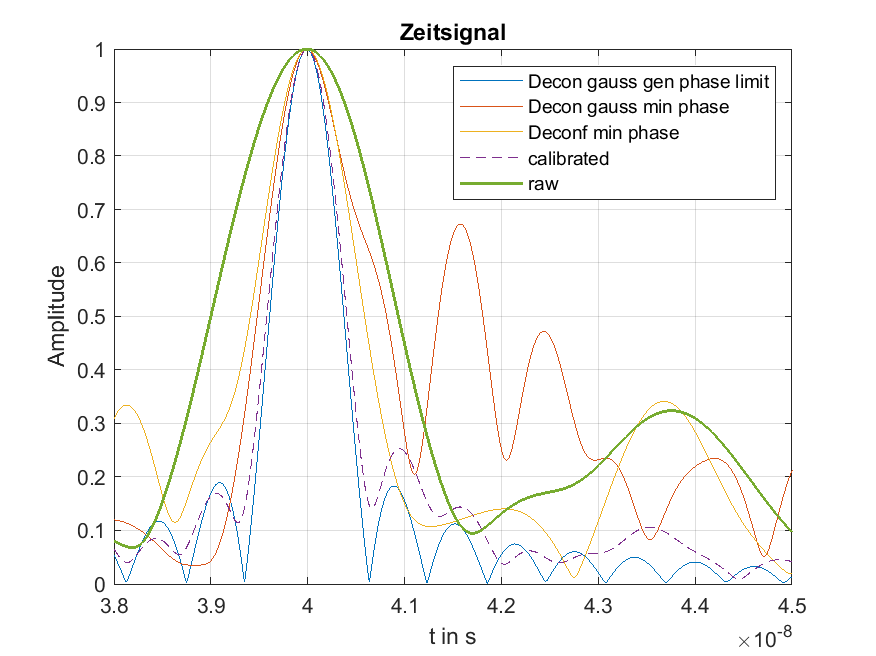
Man kann mittels mathematischer Methoden versuchen, die Bandbreite des Signals optimal zu nutzen, um einen möglichst scharfen, kurzzeitigen Puls und damit auch eine möglichst gute Auflösung in der Tiefe zu bekommen. Diese Operation nennt man Entfaltung. Im Frequenzbereich wird das Spektrum so verändert, dass daraus nach anschliessender Rücktransformation in den Zeitbereich ein möglichst kurzer, schöner Puls mit möglichst wenig Nachschwingern entsteht. Abbildung 4 zeigt beispielhaft, wie die Pulsbreite durch optimale Ausnutzung des relevanten Frequenzspektrums deutlich reduziert werden kann. Die Entfaltung ist eine inverse Operation, und damit immer heikel anzuwenden. Die Bandbreite lässt sich nicht künstlich vergrössern, man kann nur unterschiedlich gewichten.
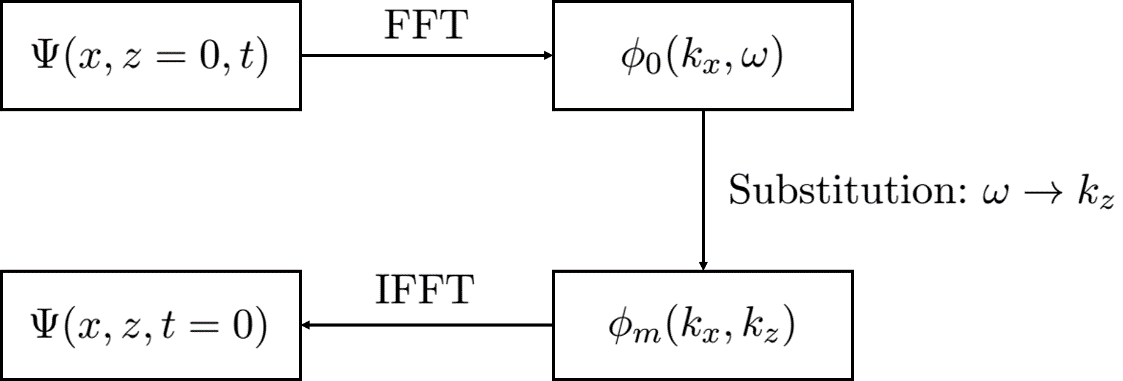
Migration
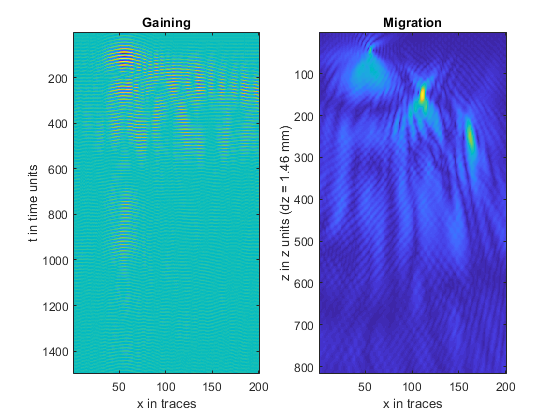
Die wichtigste Operation nach der Entfaltung und dem Gaining, welches versucht, die untergrundspezifischen Verluste zu kompensieren, ist die Migration. Damit werden die Daten eines B-Scans fokussiert, vergleichbar mit der Wirkungsweise einer Sammellinse, welche unterschiedliche Beugungsordnungen aus unterschiedlichen Richtungen zusammenführt und an einem Fokuspunkt zur Interferenz bringt. Verschiedene Migrationsalgorithmen haben sich etabliert und wurden in dieser Arbeit auch getestet. Aufgrund der Echtzeit-Anforderung an den Handscanner, haben wir uns für die schnellste dieser Methoden entschieden, die fk-Migration (Stolt-Migration) [5].
Das Resultat nach dieser Operation kann aus Abbildung 6 entnommen werden. Links im Bild sind die B-Scan-Rohdaten nach dem tiefenabhängigen Gaining dargestellt. Das Gaining hat das Ziel, die die Dämpfungsverluste zu kompensieren und überall etwa gleich starke Reflektionen zu generieren.
Rechts in Abbildung 6 sind die migrierten Daten dargestellt. Die Targets sind nun als gut fokussierte Punkte als Funktion der realen Objekttiefe erkennbar.
Fazit
Es wurde gezeigt, dass ein low-cost Radarscanner basierend auf der vayyar-Hardware machbar ist. Mittels eines automatisierten Prüfstands wurde anhand verschiedener Messaufbauten die Signal-Prozesskette für die Verarbeitung der Radardaten entwickelt. Die Scanner-Applikation wurde objektorientiert in Python codiert, wobei einige Prozessschritte in MATLAB ausgeführt werden. Eine Gliederung wird durch die Verwendung von Packages erreicht. Der Zugriff auf die Walabot-Hardware geschieht über die von vayyar zur Verfügung gestellte API [6].
Mittels eines passenden Entfaltungsfilters, eines adaptiven Gains und der fk-Migration lassen sich 2D-Schnitte des Untergrunds oder sogar 3D-Rekonstruktionen realisieren. Jedoch sollte darauf geachtet werden, dass die US-Version des Scanners verwendet werden kann. Die limitierte Bandbreite des in der EU und der Schweiz verfügbaren Frontends kann durch die Operation der Entfaltung nicht wettgemacht werden. Die für die Inspektion des Untergrunds wertvollsten Frequenzen im Bereich von 1-3 GHz fehlen. Natürlich muss dann auch die Funk-Zulassung eines solchen Geräts geklärt werden.
Referenzen
[1] Vayyar, 3 Avraham Giron, Yehud 5621717, Israel, https://vayyar.com/
[2] Walabot Developer Kit: https://walabot.com/makers
[3] Daniels, David J. (2004): Ground Penetrating Radar, 2. Auflage, London. IEE
[4] Egil S. (2000): Radar Imaging of Small Objects Closely Below the Earth Surface. August 2000. Trondheim. Norwegian University of Science and Technology
[5] Garcia, D. und Tarnec, L. L. und Muth, S. und Montagnon, E. und Porée, J. und Cloutier, G. (2013): Stolt's f-k migration for plane wave ultrasound imaging. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control. 60(9). S. 1853-1867.
[6] Vayyar Imaging (o.J.): Walabot API Beta. URL: api.walabot.com [Stand: 18.03.2019]
Duration: 28.11.2019
Team:
Prof. Dr. Christoph Würsch
ICE Institut für Computational EngineeringInstitutsleiter a.i. ICE, Dozent für Mathematik, Physik und Machine Learning
+41 58 257 34 52christoph.wuersch@ost.ch

Prof. Dr. Tindaro Pittorino
ESA Institut für Elektronik, Sensorik und AktorikDozent
+41 58 257 34 20tindaro.pittorino@ost.ch

Participating Institutes:
ICE Institut für Computational Engineering