Research project
Robotics in Farming
Exploring the possibilities of full automation in food production and general agricultural tasks such as weed detection, localisation and treatment.
A modern farm faces several challenges simultaneously. In industrially developed countries, the workforce shortage, transition from traditional to organic farming forced through herbicide prohibition, and the heavy pressure on prices from low-cost labour countries push modern farmer to existential limits. The natural production enables different pricing segment, though it implies a much higher workload for the farmer.
ILT explores the possibilities of full automation in food production and general agricultural tasks such as weed detection, localisation and treatment. Our institution tightly cooperates with leading research institutions in Switzerland and EU. The student project, WeedEraser, represents the first result towards an autonomous and environmentally compelling weed control system.
Weed Detection
Weed detection in real-time represents the highest hurdle for efficient automatic weed regulation. The most economic weed regulation approach is still herbicide use, though nowadays the dose and location of application requires must be exact. Fully automated and environmentally friendly weed control needs entirely new methods in weed detection, especially considering the localisation of treatment spot. Advances in machine learning have created opportunities to develop new methods within minimal development time.
On ILT, we modified an existing U-Net based segmentation algorithm and a new method to detect weed root using deep learning methods. The process relies on close-range images of meadow plants and can segment up to 95% of pixels correctly and locate correctly weed root in 75% of cases, [https://doi.org/10.1109/ELMAR.2019.8918914].
We explore at the moment possibilities to adapt the algorithms for data acquired from UAVs flying at higher altitudes. The goal is to maintain the detection rate by a simultaneous increase in data acquisition efficiency. Higher elevation above ground increases the area size at object plane, and by same camera setup, decreases the proportionally the level of detail. The decrease of resolution reduces the performance of CNN dramatically.
Treatment
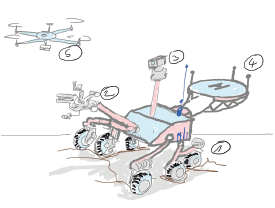
Environmentally friendly weed regulation has been intensively explored by Agroscope [https://doi.org/10.4081/jae.2014.239] in recent 15 years. It has yielded various methods for organic weed control, most successful is the thermal method, precisely hot water treatment. ILT and Agroscope cooperation resulted in the WeedEraser vehicle equipped with hot-water treatment unit and control mechanisms to position the nozzles correctly above the weed plant.
The treatment method requires from position system a 5 cm accuracy, to achieve optimal treatment results. Such positioning accuracy requires from the navigation system ability to position the vehicle in 1-2 cm above the plant. Manoeuvring on a meadow with 2000 to 10000 weed plants is economically unacceptable and raises many issues in the detection-treatment chain. ILT has developed a prototype of a scara robotic arm to soften the manoeuvring issue and achieve more efficient weed treatment. We explore possibilities to create low-cost, effective, scalable, and smart treatment unit as an addon for any carrier vehicle. With that and promote environmentally friendly weeding to other users, such as gardeners.
Funding:
Innosuisse
Partner:
Umsetzungspartnern fenaco AG, Huawei und Sunrise Communications AG, sowie Forschungspartner Agroscope, Digital Production
Project manager
Prof. Dr. Dejan Šeatović
ILT Institut für Laborautomation und MechatronikLeiter Kompetenzbereich Intelligente Systeme
+41 58 257 47 04dejan.seatovic@ost.ch