Kollisionsdetektion für autonome Baustellenfahrzeuge
Ziel der Arbeit: Das Ziel dieser Bachelorarbeit ist die Entwicklung eines Kollisionsdetektionssystems, welches in einem Baustellenfahrzeug eingesetzt werden kann.
Auf einer Baustelle ändert sich laufend die Umgebung, sodass keine zuvor definierten Fahrbereiche oder Karten verwendet werden können. Detektionssysteme aus anderen Einsatzbereichen betrachten zudem u.a. die Erkennung von Abgründen und Treppen, welche für den Baustellenbereich erfolgsentscheidend ist, nur unzureichend.
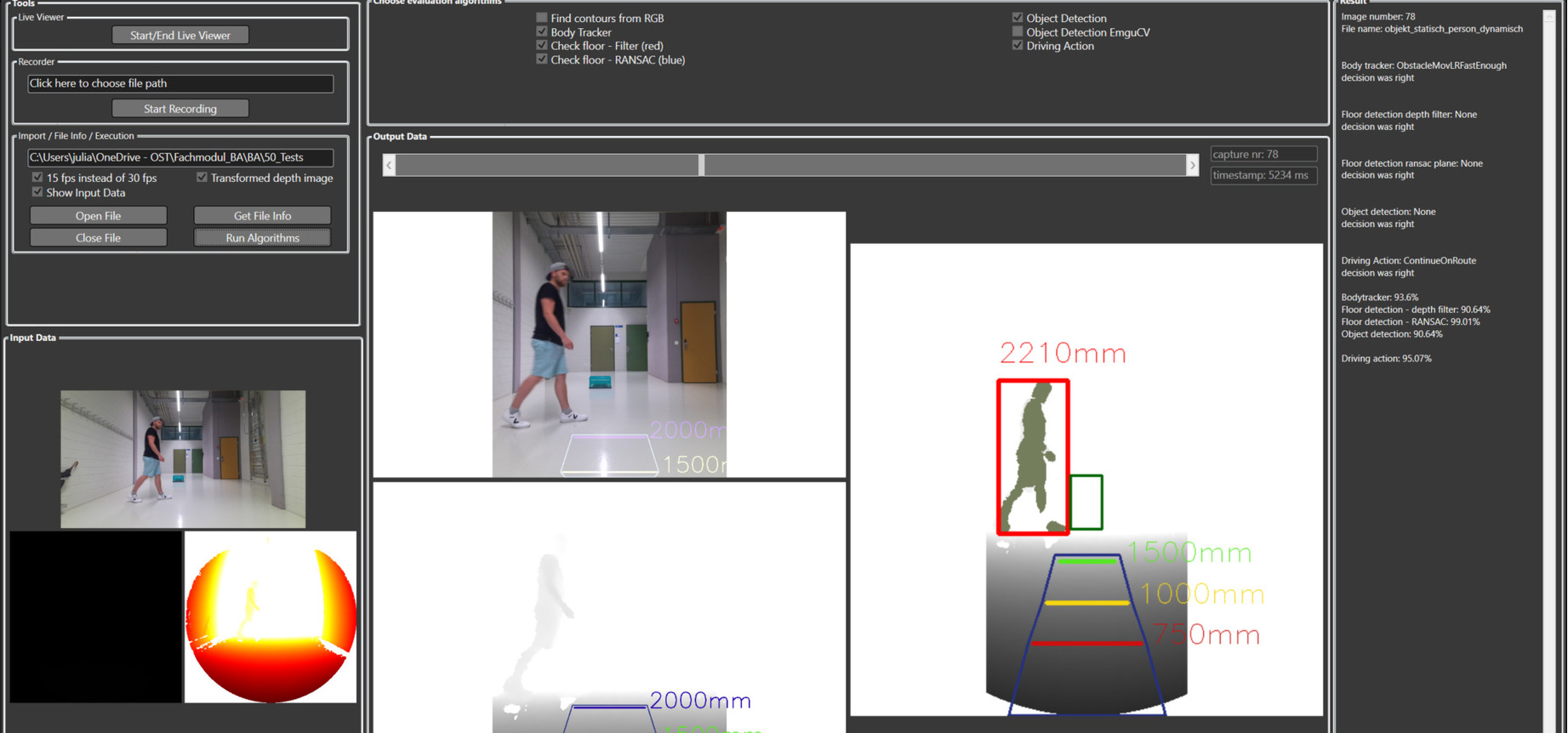
Vorgehen / Technologien: In der Arbeit wurde nicht das Fahrzeug oder die Sensorik, sondern die Auswertesoftware entwickelt. Als Sensorsystem wird das Azure Kinect DK von Microsoft eingesetzt. Dieser Sensor stellt RGB-Bilder und Tiefenkarten zur Verfügung.
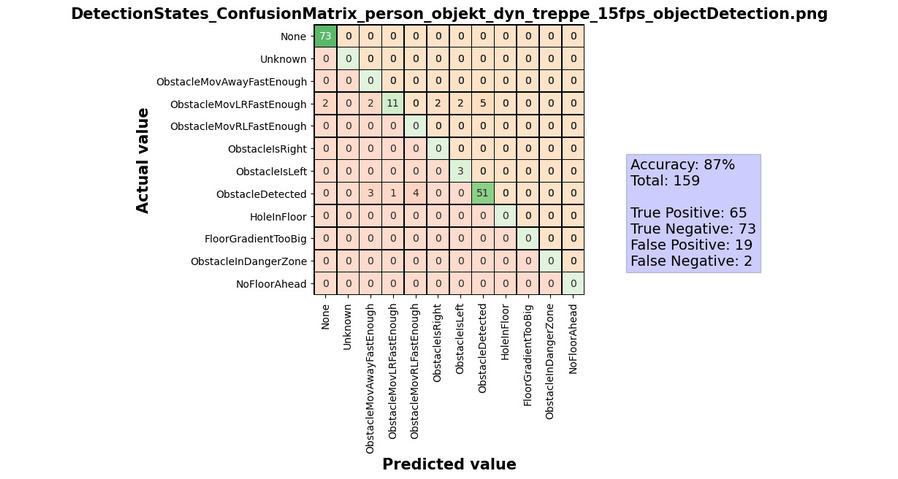
Es wurden Detektionsalgorithmen für baustellentypische Anforderungen implementiert. Dies umfasst die Erkennung des Bodens, von Personen sowie Objekten.
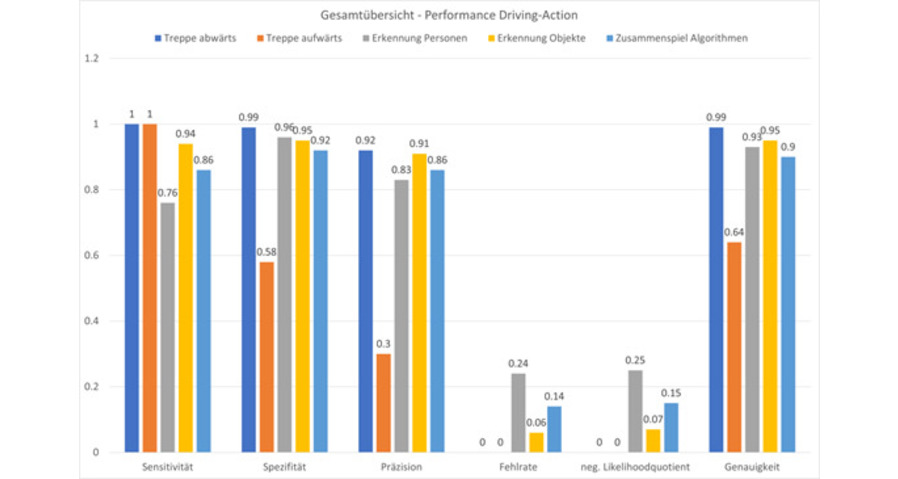
Die Detektionsresultate dieser Algorithmen werden zu einer Fahrtentscheidung zusammengeführt. Somit werden Fehlentscheidungen durch Ausreisser einzelner Detektionsalgorithmen weitgehend verhindert. Die Auswertung ist live sowie mit zuvor aufgezeichneten Daten möglich.
Fazit: Das durchgeführte Benchmarking zeigt, dass das entwickelte Kollisionsdetektionssystem die Anforderungen erfüllt. Es zeichnet sich zudem dadurch aus, dass nur ein einziges Sensorsystem integriert werden muss.
Julian Stadelmann