
Forschungsprojekt
Indoor-Lokalisierungssystem für Lichtshows mit Drohnen
Viele Veranstalter nutzen Lichteffekte anstelle von Feuerwerk, immer mehr kommen dabei Drohnen mit GPS zum Einsatz. Dank der Masterarbeit von Silvio Marti sind neu auch Drohnenshows möglich, wo kein Satellitensignal vorhanden ist.
Bei vielen Veranstaltungen wird bis heute Feuerwerk für Lichteffekte eingesetzt. Immer mehr Veranstalter haben aber begonnen, grosse Lichtshows mit Drohnen zu produzieren. Dabei nutzen die Drohnen einen satellitenbasierten Lokalisierungsdienst (GPS, Galileo etc.), um sich zu orientieren. Der technologische Fortschritt bei Indoor-Lokalisierungssystemen ermöglicht Drohnenshows auch in Hallen, wo kein Satellitensignal vorhanden ist.
Für die DJ Bobo Tour im 2019 wurden vier Drohnen in Kombination mit einem Indoor-Lokalisierungssystem entwickelt, welches die pulsbasierte Ultra-Breitbandtechnologie (UWB) verwendet. Das Lokalisierungssystem konnte aber nur sechs Positionen pro Sekunde pro Drohne berechnen und erreichte eine durchschnittliche Genauigkeit von 30 cm. Das Ziel dieser Masterarbeit war es, ein neues, ebenfalls UWB-basiertes Lokalisierungssystem zu entwickeln, um die Genauigkeit und die Lokalisierungsrate deutlich zu erhöhen.
Funktionsprinzip
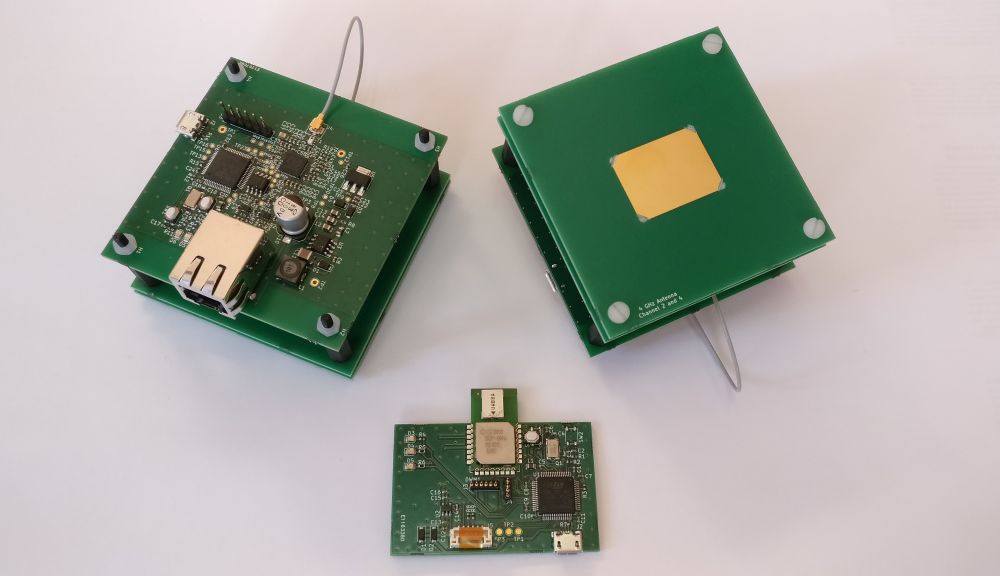
Das neue sowie das alte System basieren auf dem DW1000 Chip von Decawave. Die Referenzpunkte (Anker) werden über Kabel genau zeitsynchronisiert, damit sie den Zeitpunkt eines gesendeten oder empfangenen Pulses präzise messen können.
Für die Anker sind zwei breitbandige Patch-Antennen mit konstanten Phasenzentren entwickelt worden, um die Abhängigkeit vom Einfallswinkel eines Pulses auf die gemessene Empfangszeit zu minimieren. Die Antennen wurden so designt, dass deren Bandbreite genau der Bandbreite des jeweiligen UWB-Kanals entspricht. Damit kann einerseits der Puls optimal gesendet und empfangen werden und andererseits werden Störsender ausserhalb des Kanals (z. B. WiFi, Mobilfunknetz etc.) bereits von der Antenne herausgefiltert.
Damit eine Drohne lokalisiert werden kann, müssen zuerst die Positionen der Anker bekannt sein. Die Bestimmung aller Ankerkoordinaten, z. B. mit einem Lasermeter, ist aufwändig, mühsam und fehleranfällig. Deshalb wurde ein Autokalibrationsalgorithmus entwickelt, mit welchem sich das System selbständig ausmessen und so mit der Eingabe von wenigen bekannten Koordinaten alle übrigen automatisch bestimmen kann.
Das Grundprinzip der Drohnenlokalisierung ist dann Folgendes: Die Drohne sendet ein Puls aus, der von allen Ankern empfangen wird. Die Anker messen den Empfangszeitpunkt dieses Pulses. Mit den Differenzen der Empfangszeitpunkten und den Ankerpositionen wird anschliessend die Position der Drohne berechnet und ihr zugeschickt. Der neu entworfene Nachrichtenaustauschablauf enthält zudem Redundanz für eine erhöhte Zuverlässigkeit.
Resultat:
Das neu entwickelte Indoor-Lokalisierungssystem kann bis zu 143 Positionen pro Sekunde bestimmen und erreicht eine hervorragende Genauigkeit: 68% aller berechneten Positionen liegen innerhalb einer Kugel mit Radius 3.5 cm und 95% aller Positionen liegen innerhalb einer Kugel mit Radius 6.3 cm.
Jede Drohne, unabhängig davon wie viele Drohnen und Anker im System sind, erhält ihre Position 12.3 ms nachdem sie ihren UWB Puls ausgesendet hat. Diese kurze und konstante Messzeit ist für den Autopiloten auf der Drohne von grossem Vorteil. Das System kann in über 100 m grossen Hallen eingesetzt werden. Fazit: Mit diesem System können Bühnenshows mit über 30 Drohnen realisiert werden - und das mit einer Genauigkeit, die der Grösse eines Apfels entspricht.
Im Video erklärt der Masterstudent Silvio Marti , wie's funktioniert.

Laufzeit: 01.11.2020 - 30.11.2021
Projektleiter:
Prof. Dr. Heinz Mathis
ICOM Institut für Kommunikationssysteme Professor for Wireless Communications, Institutsleiter ICOM
+41 58 257 45 95heinz.mathis@ost.ch
